A Brief History of Greek Geometry
A Little Background:
The word geometry has its roots in the Greek work geometrein, which means “earth measuring”. Before the time of recorded history, geometry originated out of practical necessity; it was the science of measuring land. Many ancient civilizations (Babylonian, Hindu, Chinese, and Egyptian) possessed geometric information. The first geometrical considerations “had their origin in simple observations stemming from human ability to recognize physical form and to compare shapes and sizes” (Historical Topics, 165). There were many circumstances in which primitive people were forced to take on geometric topics, although it may not have been recognized as such. For instance, man had to learn with situations involving distance, bounding their land, and constructing walls and homes. These types of situations were directly related to the geometric concepts of vertical, parallel, and perpendicular.
The geometry of the ancient days was actually just a collection of rule-of-thumb procedures, which were found through experimentation, observation of analogies, guessing, and sometimes even intuition. Basically, geometry in the ancient days allowed for approximate answers, which were usually sufficient for practical purposes. For example, the Babylonians took p to be equal to 3. It is said that the Babylonians were more advanced than the Egyptians in arithmetic and algebra. They even knew the Pythagorean theorem long before Pythagoras was even born. The Babylonians had an algebraic influence on Greek mathematics.
Egyptian geometry was not a science in the way the Greeks viewed geometry. It was more of a grab bag for rules for calculation without any motivation or justification. Sometimes they guessed correctly, but other times they did not. One of their greatest accomplishments was finding the correct formula for the volume of a frustum of a square pyramid. However, they thought that the formula that they had for the area of a rectangle could be applied to any quadrilateral.
Primitive people could not escape geometry in the same way that we cannot escape it today. The concept of the curve was found in flowers and the sun, a parabola was represented by tossing an object, and spider webs posed an excellent example of regular polygons. Symmetry could be seen in many living objects, including man, and the idea of volume had to be addressed when constructing a device to hold water. Historical Topics for the Mathematics Classroom calls this type of geometry “subconscious geometry”. This is the type of geometry that very young children experience as they begin to play with objects. This type of geometry involves concrete objects.
Still before the time of recorded history, man began to consider situations that were more hypothetical. They were able to take the knowledge they had learned from observation of concrete objects and come up with general algorithms and procedures to be used in particular cases. This is what Historical Topics for the Mathematics Classroom refers to as “scientific geometry” (166-7). Procedures such as trial and error, induction, and rule-of thumb were being used to discover. This was mainly the geometry of the Babylonians and the Egyptians. Although there is no evidence that they were able to deductively reason geometric facts from basic principles, it is thought that they paved the way for Greek geometry. Geometry remained this way (“scientific”) until the Greek period.
A Bit of Greek Geometry (600 BC – 400 AD):
To see a chronological outline of the work of Greek geometers, click here. (An entire mathematical chronology can be found by visiting: www-groups.dcs.st-and.ac.uk/~history/Chronology/full.html.)
The Greeks worked to transform geometry into something much different than the “scientific geometry” of the people that worked before them. “The Greeks insisted that geometric fact mush be established, … , by deductive reasoning; …” (Historical Topics, 171). They believed that geometrical truth would be found by studying rather than experimenting. They transformed the former “scientific geometry” into a more “systematic geometry”.
Keep in mind that there exist virtually no first-hand sources of early Greek geometry. Hence, the following is based on manuscripts written hundreds of years after this early Greek geometry had been developed. According to these manuscripts, Thales of Miletus was the one who began early Greek geometry in the sixth century B.C. He is noted as one of the first known to indulge himself in deductive methods in geometry. His credited elementary geometrical findings resulted from logical reasoning rather than intuition and experiment. He insisted that geometric statements be established by deductive reasoning rather than by trial and error. He was familiar with the computations recorded from Egyptian and Babylonian mathematics, and he developed his logical geometry by determining which results were correct.
The next mentioned great Greek geometer is one who quite possibly studied under Thales of Miletus. This geometer is Pythagoras, who founded the Pythagorean school, which was “committed to the study of philosophy, mathematics, and natural science” (Historical Topics, 172). In the area of geometry, the members of this school developed the properties of parallel to prove that the sum of any angles of a triangle is equal to two right angles. They also worked with proportion to study similar figures. The deductive side of geometry was further developed during this time. We all think of the Pythagorean Theorem when we think of Pythagoras, however it is important to note that this theorem was used (although it may not have been proved) before his time.
As an interesting side note, Pythagoras was regarded as a religious prophet by his contemporaries. He preached the immortality of the soul and reincarnation, and he even organized a brotherhood of believers. This brotherhood had initiation rites, they were vegetarian, and they shared all property. They did, however, differ from other religious groups in one major way. They believed that elevation of the soul and union with God was achieved through the study of music and mathematics.
Hippocrates of Chios was one of these students at the Pythagorean school. It is suggested that he was the first to attempt “a logical presentation of geometry in the form of a single chain of propositions …” (Historical Topics, 172). He is credited to writing the first “Elements of Geometry” where he included geometric solutions to quadratic equations and some of the first methods of integration. He studied the problem of squaring a circle and squaring a lune. He also was the first to show that the ratio of the areas of two circles equals the ratio of the squares of the circles’ radii (www.geometryalgorithms.com/history.htm).
Although Plato did not make any major mathematical discoveries himself, he did emphasize the idea of proof. He insisted on accuracy, which helped pave the way for Euclid. It is correct to say that almost every significant geometrical development can be traced back to three outstanding Greek geometers: Euclid, Archimedes, and Apollonis. Euclid collected the theorems of Pythagoras, Hippocrates, and others into a work called “The Elements”. (www.geometryalgorithms.com/history.htm). Euclid is the most widely read author in the history of mankind. The teaching of geometry has been dominated by Euclid’s approach to the subject. In fact, Euclid’s axiomatic method is the prototype for all “pure mathematics”. By “pure”, it is meant that all statements can be verified through reasoning of demonstrations; no physical experiments are necessary.
Typically, the next mentioned Greek mathematician is regarded as the greatest Greek mathematician by geometryalgorithms.com. His name was Archimedes of Syracuse. He had many mathematical accomplishments as well as being the inventor of the screw, the pulley, the lever, and other mechanical devices. He perfected integration using the method of exhaustion discovered my Eudoxus, and he was able to find the areas and volumes of many objects. Inscribed on his tomb was the result he found that the volume of a sphere is two-thirds the volume of its circumscribed cylinder. (http://geometryalgorithms.com/history.htm)
Apollonius was an astronomer who had his mathematical bid to fame in his work entitled Conic Sections. It is this great Greek geometer who provided us with the terms “ellipse,” “parabola,” and “hyperbola.” He is also accredited with showing how to construct a circle which is tangent to three objects. His approximation of π was even closer than that of Archimedes. (http://geometryalgorithms.com/history.htm)
Last, but certainly not least, Hypatia of Alexandria was the first woman to substantially contribute to mathematics. She studied under her father and assisted him in writing a new version of Euclid’s Elements. She also wrote commentaries on other great Greek geometer’s works. She was the “first woman in history recognized as a professional geometer and mathematician” (http://geometryalgorithms.com/history.htm).
A Little Background:
The word geometry has its roots in the Greek work geometrein, which means “earth measuring”. Before the time of recorded history, geometry originated out of practical necessity; it was the science of measuring land. Many ancient civilizations (Babylonian, Hindu, Chinese, and Egyptian) possessed geometric information. The first geometrical considerations “had their origin in simple observations stemming from human ability to recognize physical form and to compare shapes and sizes” (Historical Topics, 165). There were many circumstances in which primitive people were forced to take on geometric topics, although it may not have been recognized as such. For instance, man had to learn with situations involving distance, bounding their land, and constructing walls and homes. These types of situations were directly related to the geometric concepts of vertical, parallel, and perpendicular.
The geometry of the ancient days was actually just a collection of rule-of-thumb procedures, which were found through experimentation, observation of analogies, guessing, and sometimes even intuition. Basically, geometry in the ancient days allowed for approximate answers, which were usually sufficient for practical purposes. For example, the Babylonians took p to be equal to 3. It is said that the Babylonians were more advanced than the Egyptians in arithmetic and algebra. They even knew the Pythagorean theorem long before Pythagoras was even born. The Babylonians had an algebraic influence on Greek mathematics.
Egyptian geometry was not a science in the way the Greeks viewed geometry. It was more of a grab bag for rules for calculation without any motivation or justification. Sometimes they guessed correctly, but other times they did not. One of their greatest accomplishments was finding the correct formula for the volume of a frustum of a square pyramid. However, they thought that the formula that they had for the area of a rectangle could be applied to any quadrilateral.
Primitive people could not escape geometry in the same way that we cannot escape it today. The concept of the curve was found in flowers and the sun, a parabola was represented by tossing an object, and spider webs posed an excellent example of regular polygons. Symmetry could be seen in many living objects, including man, and the idea of volume had to be addressed when constructing a device to hold water. Historical Topics for the Mathematics Classroom calls this type of geometry “subconscious geometry”. This is the type of geometry that very young children experience as they begin to play with objects. This type of geometry involves concrete objects.
Still before the time of recorded history, man began to consider situations that were more hypothetical. They were able to take the knowledge they had learned from observation of concrete objects and come up with general algorithms and procedures to be used in particular cases. This is what Historical Topics for the Mathematics Classroom refers to as “scientific geometry” (166-7). Procedures such as trial and error, induction, and rule-of thumb were being used to discover. This was mainly the geometry of the Babylonians and the Egyptians. Although there is no evidence that they were able to deductively reason geometric facts from basic principles, it is thought that they paved the way for Greek geometry. Geometry remained this way (“scientific”) until the Greek period.
A Bit of Greek Geometry (600 BC – 400 AD):
To see a chronological outline of the work of Greek geometers, click here. (An entire mathematical chronology can be found by visiting: www-groups.dcs.st-and.ac.uk/~history/Chronology/full.html.)
The Greeks worked to transform geometry into something much different than the “scientific geometry” of the people that worked before them. “The Greeks insisted that geometric fact mush be established, … , by deductive reasoning; …” (Historical Topics, 171). They believed that geometrical truth would be found by studying rather than experimenting. They transformed the former “scientific geometry” into a more “systematic geometry”.
Keep in mind that there exist virtually no first-hand sources of early Greek geometry. Hence, the following is based on manuscripts written hundreds of years after this early Greek geometry had been developed. According to these manuscripts, Thales of Miletus was the one who began early Greek geometry in the sixth century B.C. He is noted as one of the first known to indulge himself in deductive methods in geometry. His credited elementary geometrical findings resulted from logical reasoning rather than intuition and experiment. He insisted that geometric statements be established by deductive reasoning rather than by trial and error. He was familiar with the computations recorded from Egyptian and Babylonian mathematics, and he developed his logical geometry by determining which results were correct.
The next mentioned great Greek geometer is one who quite possibly studied under Thales of Miletus. This geometer is Pythagoras, who founded the Pythagorean school, which was “committed to the study of philosophy, mathematics, and natural science” (Historical Topics, 172). In the area of geometry, the members of this school developed the properties of parallel to prove that the sum of any angles of a triangle is equal to two right angles. They also worked with proportion to study similar figures. The deductive side of geometry was further developed during this time. We all think of the Pythagorean Theorem when we think of Pythagoras, however it is important to note that this theorem was used (although it may not have been proved) before his time.
As an interesting side note, Pythagoras was regarded as a religious prophet by his contemporaries. He preached the immortality of the soul and reincarnation, and he even organized a brotherhood of believers. This brotherhood had initiation rites, they were vegetarian, and they shared all property. They did, however, differ from other religious groups in one major way. They believed that elevation of the soul and union with God was achieved through the study of music and mathematics.
Hippocrates of Chios was one of these students at the Pythagorean school. It is suggested that he was the first to attempt “a logical presentation of geometry in the form of a single chain of propositions …” (Historical Topics, 172). He is credited to writing the first “Elements of Geometry” where he included geometric solutions to quadratic equations and some of the first methods of integration. He studied the problem of squaring a circle and squaring a lune. He also was the first to show that the ratio of the areas of two circles equals the ratio of the squares of the circles’ radii (www.geometryalgorithms.com/history.htm).
Although Plato did not make any major mathematical discoveries himself, he did emphasize the idea of proof. He insisted on accuracy, which helped pave the way for Euclid. It is correct to say that almost every significant geometrical development can be traced back to three outstanding Greek geometers: Euclid, Archimedes, and Apollonis. Euclid collected the theorems of Pythagoras, Hippocrates, and others into a work called “The Elements”. (www.geometryalgorithms.com/history.htm). Euclid is the most widely read author in the history of mankind. The teaching of geometry has been dominated by Euclid’s approach to the subject. In fact, Euclid’s axiomatic method is the prototype for all “pure mathematics”. By “pure”, it is meant that all statements can be verified through reasoning of demonstrations; no physical experiments are necessary.
Typically, the next mentioned Greek mathematician is regarded as the greatest Greek mathematician by geometryalgorithms.com. His name was Archimedes of Syracuse. He had many mathematical accomplishments as well as being the inventor of the screw, the pulley, the lever, and other mechanical devices. He perfected integration using the method of exhaustion discovered my Eudoxus, and he was able to find the areas and volumes of many objects. Inscribed on his tomb was the result he found that the volume of a sphere is two-thirds the volume of its circumscribed cylinder. (http://geometryalgorithms.com/history.htm)
Apollonius was an astronomer who had his mathematical bid to fame in his work entitled Conic Sections. It is this great Greek geometer who provided us with the terms “ellipse,” “parabola,” and “hyperbola.” He is also accredited with showing how to construct a circle which is tangent to three objects. His approximation of π was even closer than that of Archimedes. (http://geometryalgorithms.com/history.htm)
Last, but certainly not least, Hypatia of Alexandria was the first woman to substantially contribute to mathematics. She studied under her father and assisted him in writing a new version of Euclid’s Elements. She also wrote commentaries on other great Greek geometer’s works. She was the “first woman in history recognized as a professional geometer and mathematician” (http://geometryalgorithms.com/history.htm).
Euclidean Geometry
Euclidean geometry is a mathematical system attributed to the Alexandrian Greek mathematician Euclid, which he described in his textbook on geometry: the Elements. Euclid's method consists in assuming a small set of intuitively appealing axioms, and deducing many other propositions (theorems) from these. Although many of Euclid's results had been stated by earlier mathematiciansEuclid was the first to show how these propositions could fit into a comprehensive deductive and logical system. The Elements begins with plane geometry, still taught in secondary school as the first axiomatic system and the first examples of formal proof. It goes on to the solid geometry of three dimensions. Much of the Elements states results of what are now called algebra and number theory, explained in geometrical language.
For over two thousand years, the adjective "Euclidean" was unnecessary because no other sort of geometry had been conceived. Euclid's axioms seemed so intuitively obvious (with the possible exception of the parallel postulate) that any theorem proved from them was deemed true in an absolute, often metaphysical, sense. Today, however, many other self-consistent non-Euclidean geometries are known, the first ones having been discovered in the early 19th century. An implication of Einstein's theory of general relativity is that physical space itself is not Euclidean, and Euclidean space is a good approximation for it only where the gravitational field is weak.
The Elements Main article: Euclid's Elements The Elements are mainly a systematization of earlier knowledge of geometry. Its superiority over earlier treatments was rapidly recognized, with the result that there was little interest in preserving the earlier ones, and they are now nearly all lost.
Books I–IV and VI discuss plane geometry. Many results about plane figures are proved, e.g., If a triangle has two equal angles, then the sides subtended by the angles are equal. The Pythagorean theorem is proved.
Books V and VII–X deal with number theory, with numbers treated geometrically via their representation as line segments with various lengths. Notions such as prime numbers and rational and irrational numbers are introduced. The infinitude of prime numbers is proved.
Books XI–XIII concern solid geometry. A typical result is the 1:3 ratio between the volume of a cone and a cylinder with the same height and base.
The parallel postulate: If two lines intersect a third in such a way that the sum of the inner angles on one side is less than two right angles, then the two lines inevitably must intersect each other on that side if extended far enough. Axioms Euclidean geometry is an axiomatic system, in which all theorems ("true statements") are derived from a small number of axioms. Near the beginning of the first book of the Elements, Euclid gives five postulates (axioms) for plane geometry, stated in terms of constructions (as translated by Thomas Heath):
"Let the following be postulated":
The Elements also include the following five "common notions":
Many alternative axioms can be formulated that have the same logical consequences as the parallel postulate. For example Playfair's axiom states:
In a plane, through a point not on a given straight line, at most one line can be drawn that never meets the given line. A proof from Euclid's elements that, given a line segment, an equilateral triangle exists that includes the segment as one of its sides. The proof is by construction: an equilateral triangle ΑΒΓ is made by drawing circles Δ and Ε centered on the points Α and Β, and taking one intersection of the circles as the third vertex of the triangle. Methods of proof Euclidean Geometry is constructive. Postulates 1, 2, 3, and 5 assert the existence and uniqueness of certain geometric figures, and these assertions are of a constructive nature: that is, we are not only told that certain things exist, but are also given methods for creating them with no more than a compass and an unmarked straightedge. In this sense, Euclidean geometry is more concrete than many modern axiomatic systems such as set theory, which often assert the existence of objects without saying how to construct them, or even assert the existence of objects that cannot be constructed within the theory. Strictly speaking, the lines on paper are models of the objects defined within the formal system, rather than instances of those objects. For example a Euclidean straight line has no width, but any real drawn line will. Though nearly all modern mathematicians consider nonconstructive methods just as sound as constructive ones, Euclid's constructive proofs often supplanted fallacious nonconstructive ones—e.g., some of the Pythagoreans' proofs that involved irrational numbers, which usually required a statement such as "Find the greatest common measure of ...
Euclid often used proof by contradiction. Euclidean geometry also allows the method of superposition, in which a figure is transferred to another point in space. For example, proposition I.4, side-angle-side congruence of triangles, is proved by moving one of the two triangles so that one of its sides coincides with the other triangle's equal side, and then proving that the other sides coincide as well. Some modern treatments add a sixth postulate, the rigidity of the triangle, which can be used as an alternative to superposition.
System of measurement and arithmetic Euclidean geometry has two fundamental types of measurements: angle and distance. The angle scale is absolute, and Euclid uses the right angle as his basic unit, so that, e.g., a 45-degree angle would be referred to as half of a right angle. The distance scale is relative; one arbitrarily picks a line segment with a certain nonzero length as the unit, and other distances are expressed in relation to it.
A line in Euclidean geometry is a model of the real number line. A line segment is a part of a line that is bounded by two end points, and contains every point on the line between its end points. Addition is represented by a construction in which one line segment is copied onto the end of another line segment to extend its length, and similarly for subtraction.
Measurements of area and volume are derived from distances. For example, a rectangle with a width of 3 and a length of 4 has an area that represents the product, 12. Because this geometrical interpretation of multiplication was limited to three dimensions, there was no direct way of interpreting the product of four or more numbers, and Euclid avoided such products, although they are implied, e.g., in the proof of book IX, proposition 20.
An example of congruence. The two figures on the left are congruent, while the third is similar to them. The last figure is neither. Note that congruences alter some properties, such as location and orientation, but leave others unchanged, like distance and angles. The latter sort of properties are called invariants and studying them is the essence of geometry. Euclid refers to a pair of lines, or a pair of planar or solid figures, as "equal" (ἴσος) if their lengths, areas, or volumes are equal, and similarly for angles. The stronger term "congruent" refers to the idea that an entire figure is the same size and shape as another figure. Alternatively, two figures are congruent if one can be moved on top of the other so that it matches up with it exactly. (Flipping it over is allowed.) Thus, for example, a 2x6 rectangle and a 3x4 rectangle are equal but not congruent, and the letter R is congruent to its mirror image. Figures that would be congruent except for their differing sizes are referred to as similar. Corresponding angles in a pair of similar shapes are congruent and corresponding sides are in proportion to each other.
Notation and terminology Naming of points and figures Points are customarily named using capital letters of the alphabet. Other figures, such as lines, triangles, or circles, are named by listing a sufficient number of points to pick them out unambiguously from the relevant figure, e.g., triangle ABC would typically be a triangle with vertices at points A, B, and C.
Complementary and supplementary angles Angles whose sum is a right angle are called complementary. Complementary angles are formed when one or more rays share the same vertex and are pointed in a direction that is in between the two original rays that form the right angle. The number of rays in between the two original rays are infinite. Those whose sum is a straight angle are supplementary. Supplementary angles are formed when one or more rays share the same vertex and are pointed in a direction that in between the two original rays that form the straight angle (180 degrees). The number of rays in between the two original rays are infinite like those possible in the complementary angle.
Modern versions of Euclid's notation In modern terminology, angles would normally be measured in degrees or radians.
Modern school textbooks often define separate figures called lines (infinite), rays (semi-infinite), and line segments (of finite length). Euclid, rather than discussing a ray as an object that extends to infinity in one direction, would normally use locutions such as "if the line is extended to a sufficient length," although he occasionally referred to "infinite lines." A "line" in Euclid could be either straight or curved, and he used the more specific term "straight line" when necessary.
(http://en.wikipedia.org/wiki/Euclidean_geometry)
For over two thousand years, the adjective "Euclidean" was unnecessary because no other sort of geometry had been conceived. Euclid's axioms seemed so intuitively obvious (with the possible exception of the parallel postulate) that any theorem proved from them was deemed true in an absolute, often metaphysical, sense. Today, however, many other self-consistent non-Euclidean geometries are known, the first ones having been discovered in the early 19th century. An implication of Einstein's theory of general relativity is that physical space itself is not Euclidean, and Euclidean space is a good approximation for it only where the gravitational field is weak.
The Elements Main article: Euclid's Elements The Elements are mainly a systematization of earlier knowledge of geometry. Its superiority over earlier treatments was rapidly recognized, with the result that there was little interest in preserving the earlier ones, and they are now nearly all lost.
Books I–IV and VI discuss plane geometry. Many results about plane figures are proved, e.g., If a triangle has two equal angles, then the sides subtended by the angles are equal. The Pythagorean theorem is proved.
Books V and VII–X deal with number theory, with numbers treated geometrically via their representation as line segments with various lengths. Notions such as prime numbers and rational and irrational numbers are introduced. The infinitude of prime numbers is proved.
Books XI–XIII concern solid geometry. A typical result is the 1:3 ratio between the volume of a cone and a cylinder with the same height and base.
The parallel postulate: If two lines intersect a third in such a way that the sum of the inner angles on one side is less than two right angles, then the two lines inevitably must intersect each other on that side if extended far enough. Axioms Euclidean geometry is an axiomatic system, in which all theorems ("true statements") are derived from a small number of axioms. Near the beginning of the first book of the Elements, Euclid gives five postulates (axioms) for plane geometry, stated in terms of constructions (as translated by Thomas Heath):
"Let the following be postulated":
- "To draw a straight line from any point to any point."
- "To produce [extend] a finite straight line continuously in a straight line."
- "To describe a circle with any centre and distance [radius]."
- "That all right angles are equal to one another."
- The parallel postulate: "That, if a straight line falling on two straight lines make the interior angles on the same side less than two right angles, the two straight lines, if produced indefinitely, meet on that side on which are the angles less than the two right angles."
The Elements also include the following five "common notions":
- Things that are equal to the same thing are also equal to one another (Transitive property of equality).
- If equals are added to equals, then the wholes are equal.
- If equals are subtracted from equals, then the remainders are equal.
- Things that coincide with one another are equal to one another (Reflexive Property).
- The whole is greater than the part.
Many alternative axioms can be formulated that have the same logical consequences as the parallel postulate. For example Playfair's axiom states:
In a plane, through a point not on a given straight line, at most one line can be drawn that never meets the given line. A proof from Euclid's elements that, given a line segment, an equilateral triangle exists that includes the segment as one of its sides. The proof is by construction: an equilateral triangle ΑΒΓ is made by drawing circles Δ and Ε centered on the points Α and Β, and taking one intersection of the circles as the third vertex of the triangle. Methods of proof Euclidean Geometry is constructive. Postulates 1, 2, 3, and 5 assert the existence and uniqueness of certain geometric figures, and these assertions are of a constructive nature: that is, we are not only told that certain things exist, but are also given methods for creating them with no more than a compass and an unmarked straightedge. In this sense, Euclidean geometry is more concrete than many modern axiomatic systems such as set theory, which often assert the existence of objects without saying how to construct them, or even assert the existence of objects that cannot be constructed within the theory. Strictly speaking, the lines on paper are models of the objects defined within the formal system, rather than instances of those objects. For example a Euclidean straight line has no width, but any real drawn line will. Though nearly all modern mathematicians consider nonconstructive methods just as sound as constructive ones, Euclid's constructive proofs often supplanted fallacious nonconstructive ones—e.g., some of the Pythagoreans' proofs that involved irrational numbers, which usually required a statement such as "Find the greatest common measure of ...
Euclid often used proof by contradiction. Euclidean geometry also allows the method of superposition, in which a figure is transferred to another point in space. For example, proposition I.4, side-angle-side congruence of triangles, is proved by moving one of the two triangles so that one of its sides coincides with the other triangle's equal side, and then proving that the other sides coincide as well. Some modern treatments add a sixth postulate, the rigidity of the triangle, which can be used as an alternative to superposition.
System of measurement and arithmetic Euclidean geometry has two fundamental types of measurements: angle and distance. The angle scale is absolute, and Euclid uses the right angle as his basic unit, so that, e.g., a 45-degree angle would be referred to as half of a right angle. The distance scale is relative; one arbitrarily picks a line segment with a certain nonzero length as the unit, and other distances are expressed in relation to it.
A line in Euclidean geometry is a model of the real number line. A line segment is a part of a line that is bounded by two end points, and contains every point on the line between its end points. Addition is represented by a construction in which one line segment is copied onto the end of another line segment to extend its length, and similarly for subtraction.
Measurements of area and volume are derived from distances. For example, a rectangle with a width of 3 and a length of 4 has an area that represents the product, 12. Because this geometrical interpretation of multiplication was limited to three dimensions, there was no direct way of interpreting the product of four or more numbers, and Euclid avoided such products, although they are implied, e.g., in the proof of book IX, proposition 20.
An example of congruence. The two figures on the left are congruent, while the third is similar to them. The last figure is neither. Note that congruences alter some properties, such as location and orientation, but leave others unchanged, like distance and angles. The latter sort of properties are called invariants and studying them is the essence of geometry. Euclid refers to a pair of lines, or a pair of planar or solid figures, as "equal" (ἴσος) if their lengths, areas, or volumes are equal, and similarly for angles. The stronger term "congruent" refers to the idea that an entire figure is the same size and shape as another figure. Alternatively, two figures are congruent if one can be moved on top of the other so that it matches up with it exactly. (Flipping it over is allowed.) Thus, for example, a 2x6 rectangle and a 3x4 rectangle are equal but not congruent, and the letter R is congruent to its mirror image. Figures that would be congruent except for their differing sizes are referred to as similar. Corresponding angles in a pair of similar shapes are congruent and corresponding sides are in proportion to each other.
Notation and terminology Naming of points and figures Points are customarily named using capital letters of the alphabet. Other figures, such as lines, triangles, or circles, are named by listing a sufficient number of points to pick them out unambiguously from the relevant figure, e.g., triangle ABC would typically be a triangle with vertices at points A, B, and C.
Complementary and supplementary angles Angles whose sum is a right angle are called complementary. Complementary angles are formed when one or more rays share the same vertex and are pointed in a direction that is in between the two original rays that form the right angle. The number of rays in between the two original rays are infinite. Those whose sum is a straight angle are supplementary. Supplementary angles are formed when one or more rays share the same vertex and are pointed in a direction that in between the two original rays that form the straight angle (180 degrees). The number of rays in between the two original rays are infinite like those possible in the complementary angle.
Modern versions of Euclid's notation In modern terminology, angles would normally be measured in degrees or radians.
Modern school textbooks often define separate figures called lines (infinite), rays (semi-infinite), and line segments (of finite length). Euclid, rather than discussing a ray as an object that extends to infinity in one direction, would normally use locutions such as "if the line is extended to a sufficient length," although he occasionally referred to "infinite lines." A "line" in Euclid could be either straight or curved, and he used the more specific term "straight line" when necessary.
(http://en.wikipedia.org/wiki/Euclidean_geometry)
GEOMETRY is all about shapes and their properties.
It was divided into :
Plane Geometry
is all about shapes like lines, circles and triangles ... shapes that can be drawn on a flat surface called a Plane (it is like on an endless piece of paper).
Solid Geometry
is about three dimensional objects like cubes, prisms, cylinders and spheres.
PLANE GEOMETRY
In mathematics, a plane is a flat, two-dimensional surface. A plane is the two dimensional analogue of a point (zero-dimensions), a line (one-dimension) and a solid (three-dimensions). Planes can arise as subspaces of some higher dimensional space, as with the walls of a room, or they may enjoy an independent existence in their own right, as in the setting of Euclidean geometry.
When working exclusively in two-dimensional Euclidean space, the definite article is used, so, the plane refers to the whole space. Many fundamental tasks in mathematics, geometry, trigonometry, graph theory and graphing are performed in a two-dimensional space, or in other words, in the plane.
(http://en.wikipedia.org/wiki/Plane_%28geometry%29)
Plane Geometric Formulas
square: Area = a x a = a2
Perimeter = 4a
Where a = side of a square
Rectangle:
Area = Length x breadth = l x b
Perimeter = 2l + 2b
Where l = length
b = breadth
Triangle:
A= 1/2bh where; s=a+b+c/2
P=a+b+c
Parallelogram:
Area = base (b)*height (h)
Perimeter = 2a + 2b
Trapezoid:
Area =(a+b/2)xh
Perimeter = a + b + c + d
Circle:
Area =πr2
Perimeter = 2πr
Regular polygon:
Area = n x area of each triangle
Perimeter = n x length of each side (a)
Where n = no. of sides
SOLID GEOMETRY
In mathematics, solid geometry was the traditional name for the geometry of three-dimensional Euclidean space — for practical purposes the kind of space we live in. It was developed following the development of plane geometry. Stereometry deals with the measurements of volumes of various solid figures including cylinder, circular cone, truncated cone, sphere, and prisms.
The Pythagoreans had dealt with the regular solids, but the pyramid, prism, cone and cylinder were not studied until the Platonists. Eudoxus established their measurement, proving the pyramid and cone to have one-third the volume of a prism and cylinder on the same base and of the same height, and was probably the discoverer of a proof that the volume of a sphere is proportional to the cube of its radius.[1]
(http://en.wikipedia.org/wiki/Solid_geometry).
SOLID GEOMETRY FORMULAS:
AREA OF PRISMS
There are special formulas that deal with prisms, but they only deal with right prisms. Right prisms are prisms that have two special characteristics - all lateral edges are perpendicular to the bases, and lateral faces are rectangular. The figure below depicts a right prism.
Right Prism Area
The lateral area L (area of the vertical sides only) of any right prism is equal to the perimeter of the base times the height of the prism (L = Ph).
The total area T of any right prism is equal to two times the area of the base plus the lateral area.
Formula: T = 2B + Ph
Right Prism Volume Postulate
The volume V of any right prism is the product of B, the area of the base, and the height h of the prism.
Formula: V = Bh
A pyramid is a polyhedron with a single base and lateral faces that are all triangular. All lateral edges of a pyramid meet at a single point, or vertex.
Pyramid Volume Theorem
The volume V of any pyramid with height h and a base with area B is equal to one-third the product of the height and the area of the base.
Formula: V = (1/3)Bh
A regular pyramid is a pyramid that has a base that is a regular polygon and with lateral faces that are all congruent isosceles triangles.
Regular Pyramid Area Theorem
The area L of any regular pyramid with a base that has perimeter P and with slant height l is equal to one-half the product of the perimeter and the slant height.
Formula: L = .5Pl
Cylinder Volume Theorem
The volume V of any cylinder with radius r and height h is equal to the product of the area of a base and the height.
Formula: V = (PI)r2h
Cylinder Area Theorem
For any right circular cylinder with radius r and height h, the total area T is two times the area of the base plus the lateral area (2(PI)rh).
Formula: T = 2(PI)rh + 2(PI)r2
Cone Volume Theorem
The volume V of any cone with radius r and height h is equal to one-third the product of the height and the area of the base.
Formula: V = (1/3)(PI)r2h
Cone Area Theorem
The total area T of a cone with radius r and slant height l is equal to the area of the base plus PI times the product of the radius and the slant height.
Formula: T = (PI)rl + (PI)r2
Sphere Volume and Area Theorem
The volume V for any sphere with radius r is equal to four-thirds times the product of PI and the cube of the radius. The area A of any sphere with radius r is equal to 4(PI) times the square of the radius.
Volume Formula: V = (4/3)(PI)r3
Area Formula: A = 4(PI)r2
(http://library.thinkquest.org/20991/geo/solids.html)
CubeS
A cube is a three-dimensional figure with six matching square sides.
If s is the length of one of its sides, then the volume of the cube is s × s × s
Volume of the cube = s3
The area of each side of a cube is s2. Since a cube has six square-shape sides, its total surface area is 6 times s2.
Surface area of a cube = 6s2
Rectangular Solids or Cuboids
A rectangular solid is also called a rectangular prism or a cuboid.
In a rectangular solid, the length, width and height may be of different lengths.
Volume of rectangular solid = lwh
Total area of top and bottom surfaces is lw + lw = 2lw
Total area of front and back surfaces is lh + lh = 2lh
Total area of the two side surfaces is wh + wh = 2wh Surface area of rectangular solid = 2lw + 2lh + 2wh = 2(lw + lh + wh)
It was divided into :
Plane Geometry
is all about shapes like lines, circles and triangles ... shapes that can be drawn on a flat surface called a Plane (it is like on an endless piece of paper).
Solid Geometry
is about three dimensional objects like cubes, prisms, cylinders and spheres.
PLANE GEOMETRY
In mathematics, a plane is a flat, two-dimensional surface. A plane is the two dimensional analogue of a point (zero-dimensions), a line (one-dimension) and a solid (three-dimensions). Planes can arise as subspaces of some higher dimensional space, as with the walls of a room, or they may enjoy an independent existence in their own right, as in the setting of Euclidean geometry.
When working exclusively in two-dimensional Euclidean space, the definite article is used, so, the plane refers to the whole space. Many fundamental tasks in mathematics, geometry, trigonometry, graph theory and graphing are performed in a two-dimensional space, or in other words, in the plane.
(http://en.wikipedia.org/wiki/Plane_%28geometry%29)
Plane Geometric Formulas
square: Area = a x a = a2
Perimeter = 4a
Where a = side of a square
Rectangle:
Area = Length x breadth = l x b
Perimeter = 2l + 2b
Where l = length
b = breadth
Triangle:
A= 1/2bh where; s=a+b+c/2
P=a+b+c
Parallelogram:
Area = base (b)*height (h)
Perimeter = 2a + 2b
Trapezoid:
Area =(a+b/2)xh
Perimeter = a + b + c + d
Circle:
Area =πr2
Perimeter = 2πr
Regular polygon:
Area = n x area of each triangle
Perimeter = n x length of each side (a)
Where n = no. of sides
SOLID GEOMETRY
In mathematics, solid geometry was the traditional name for the geometry of three-dimensional Euclidean space — for practical purposes the kind of space we live in. It was developed following the development of plane geometry. Stereometry deals with the measurements of volumes of various solid figures including cylinder, circular cone, truncated cone, sphere, and prisms.
The Pythagoreans had dealt with the regular solids, but the pyramid, prism, cone and cylinder were not studied until the Platonists. Eudoxus established their measurement, proving the pyramid and cone to have one-third the volume of a prism and cylinder on the same base and of the same height, and was probably the discoverer of a proof that the volume of a sphere is proportional to the cube of its radius.[1]
(http://en.wikipedia.org/wiki/Solid_geometry).
SOLID GEOMETRY FORMULAS:
AREA OF PRISMS
There are special formulas that deal with prisms, but they only deal with right prisms. Right prisms are prisms that have two special characteristics - all lateral edges are perpendicular to the bases, and lateral faces are rectangular. The figure below depicts a right prism.
Right Prism Area
The lateral area L (area of the vertical sides only) of any right prism is equal to the perimeter of the base times the height of the prism (L = Ph).
The total area T of any right prism is equal to two times the area of the base plus the lateral area.
Formula: T = 2B + Ph
Right Prism Volume Postulate
The volume V of any right prism is the product of B, the area of the base, and the height h of the prism.
Formula: V = Bh
A pyramid is a polyhedron with a single base and lateral faces that are all triangular. All lateral edges of a pyramid meet at a single point, or vertex.
Pyramid Volume Theorem
The volume V of any pyramid with height h and a base with area B is equal to one-third the product of the height and the area of the base.
Formula: V = (1/3)Bh
A regular pyramid is a pyramid that has a base that is a regular polygon and with lateral faces that are all congruent isosceles triangles.
Regular Pyramid Area Theorem
The area L of any regular pyramid with a base that has perimeter P and with slant height l is equal to one-half the product of the perimeter and the slant height.
Formula: L = .5Pl
Cylinder Volume Theorem
The volume V of any cylinder with radius r and height h is equal to the product of the area of a base and the height.
Formula: V = (PI)r2h
Cylinder Area Theorem
For any right circular cylinder with radius r and height h, the total area T is two times the area of the base plus the lateral area (2(PI)rh).
Formula: T = 2(PI)rh + 2(PI)r2
Cone Volume Theorem
The volume V of any cone with radius r and height h is equal to one-third the product of the height and the area of the base.
Formula: V = (1/3)(PI)r2h
Cone Area Theorem
The total area T of a cone with radius r and slant height l is equal to the area of the base plus PI times the product of the radius and the slant height.
Formula: T = (PI)rl + (PI)r2
Sphere Volume and Area Theorem
The volume V for any sphere with radius r is equal to four-thirds times the product of PI and the cube of the radius. The area A of any sphere with radius r is equal to 4(PI) times the square of the radius.
Volume Formula: V = (4/3)(PI)r3
Area Formula: A = 4(PI)r2
(http://library.thinkquest.org/20991/geo/solids.html)
CubeS
A cube is a three-dimensional figure with six matching square sides.
If s is the length of one of its sides, then the volume of the cube is s × s × s
Volume of the cube = s3
The area of each side of a cube is s2. Since a cube has six square-shape sides, its total surface area is 6 times s2.
Surface area of a cube = 6s2
Rectangular Solids or Cuboids
A rectangular solid is also called a rectangular prism or a cuboid.
In a rectangular solid, the length, width and height may be of different lengths.
Volume of rectangular solid = lwh
Total area of top and bottom surfaces is lw + lw = 2lw
Total area of front and back surfaces is lh + lh = 2lh
Total area of the two side surfaces is wh + wh = 2wh Surface area of rectangular solid = 2lw + 2lh + 2wh = 2(lw + lh + wh)
Analytic geometry
analytic geometry, branch of geometry in which points are represented with respect to a coordinate system, such as Cartesian coordinates, and in which the approach to geometric problems is primarily algebraic. Its most common application is in the representation of equations involving two or three variables as curves in two or three dimensions or surfaces in three dimensions. For example, the linear equation ax + by + c = 0 represents a straight line in the xy -plane, and the linear equation ax + by + cz + d = 0 represents a plane in space, where a, b, c, and d are constant numbers (coefficients). In this way a geometric problem can be translated into an algebraic problem and the methods of algebra brought to bear on its solution. Conversely, the solution of a problem in algebra, such as finding the roots of an equation or system of equations, can be estimated or sometimes given exactly by geometric means, e.g., plotting curves and surfaces and determining points of intersection.
In plane analytic geometry a line is frequently described in terms of its slope, which expresses its inclination to the coordinate axes; technically, the slope m of a straight line is the (trigonometric) tangent of the angle it makes with the x -axis. If the line is parallel to the x -axis, its slope is zero. Two or more lines with equal slopes are parallel to one another. In general, the slope of the line through the points ( x 1, y 1) and ( x 2, y 2) is given by m = ( y 2 - y 1) / ( x 2 - x 1). The conic sections are treated in analytic geometry as the curves corresponding to the general quadratic equation ax 2+ bxy + cy 2+ dx + ey + f = 0, where a, b, … , f are constants and a, b, and c are not all zero.
In solid analytic geometry the orientation of a straight line is given not by one slope but by its direction cosines, λ, μ, and ν, the cosines of the angles the line makes with the x-, y-, and z -axes, respectively; these satisfy the relationship λ2+μ2+ν2 = 1. In the same way that the conic sections are studied in two dimensions, the 17 quadric surfaces, e.g., the ellipsoid, paraboloid, and elliptic paraboloid, are studied in solid analytic geometry in terms of the general equation ax 2+ by 2+ cz 2+ dxy + exz + fyz + px + qy + rz + s = 0.
The methods of analytic geometry have been generalized to four or more dimensions and have been combined with other branches of geometry. Analytic geometry was introduced by René Descartes in 1637 and was of fundamental importance in the development of the calculus by Sir Isaac Newton and G. W. Leibniz in the late 17th cent. More recently it has served as the basis for the modern development and exploitation of algebraic geometry.
(http://www.infoplease.com/encyclopedia/science/analytic-geometry.html)
Read more: analytic geometry | Infoplease.com http://www.infoplease.com/encyclopedia/science/analytic-geometry.html#ixzz2diL0H3Sm
analytic geometry, branch of geometry in which points are represented with respect to a coordinate system, such as Cartesian coordinates, and in which the approach to geometric problems is primarily algebraic. Its most common application is in the representation of equations involving two or three variables as curves in two or three dimensions or surfaces in three dimensions. For example, the linear equation ax + by + c = 0 represents a straight line in the xy -plane, and the linear equation ax + by + cz + d = 0 represents a plane in space, where a, b, c, and d are constant numbers (coefficients). In this way a geometric problem can be translated into an algebraic problem and the methods of algebra brought to bear on its solution. Conversely, the solution of a problem in algebra, such as finding the roots of an equation or system of equations, can be estimated or sometimes given exactly by geometric means, e.g., plotting curves and surfaces and determining points of intersection.
In plane analytic geometry a line is frequently described in terms of its slope, which expresses its inclination to the coordinate axes; technically, the slope m of a straight line is the (trigonometric) tangent of the angle it makes with the x -axis. If the line is parallel to the x -axis, its slope is zero. Two or more lines with equal slopes are parallel to one another. In general, the slope of the line through the points ( x 1, y 1) and ( x 2, y 2) is given by m = ( y 2 - y 1) / ( x 2 - x 1). The conic sections are treated in analytic geometry as the curves corresponding to the general quadratic equation ax 2+ bxy + cy 2+ dx + ey + f = 0, where a, b, … , f are constants and a, b, and c are not all zero.
In solid analytic geometry the orientation of a straight line is given not by one slope but by its direction cosines, λ, μ, and ν, the cosines of the angles the line makes with the x-, y-, and z -axes, respectively; these satisfy the relationship λ2+μ2+ν2 = 1. In the same way that the conic sections are studied in two dimensions, the 17 quadric surfaces, e.g., the ellipsoid, paraboloid, and elliptic paraboloid, are studied in solid analytic geometry in terms of the general equation ax 2+ by 2+ cz 2+ dxy + exz + fyz + px + qy + rz + s = 0.
The methods of analytic geometry have been generalized to four or more dimensions and have been combined with other branches of geometry. Analytic geometry was introduced by René Descartes in 1637 and was of fundamental importance in the development of the calculus by Sir Isaac Newton and G. W. Leibniz in the late 17th cent. More recently it has served as the basis for the modern development and exploitation of algebraic geometry.
(http://www.infoplease.com/encyclopedia/science/analytic-geometry.html)
Read more: analytic geometry | Infoplease.com http://www.infoplease.com/encyclopedia/science/analytic-geometry.html#ixzz2diL0H3Sm
Descartes and the birth of Analytic Geometry.

Rene Descartes.
Descartes’ Analytic Geometry: Plotting the Future of MathematicsRené Descartes dipped his quill pen into the ink. “This is one thing which I believe the ancient mathematicians did not observe,” he wrote, “for otherwise they would not have put so much labor into writing so many books in which the very sequence of the propositions shows that they did not have a sure method of finding all, but rather gathered together those propositions on which they had happened by accident.”1 What is the “thing” that the early mathematicians had missed? It was analytic geometry, a method invented by Descartes that used algebraic equations to describe geometric objects. Descartes discovered that he could solve difficult mathematical problems using this method. The key idea was to use coordinate axes to bring algebra and geometry together. This was an innovation that enabled mathematicians to solve complex problems and invent new forms of mathematics such as calculus, which laid the foundation for modern science and technology. The history of mathematics begins with geometry. Euclid, a Greek mathematician, lived around 300 BC in Alexandria, Egypt. He invented a form of geometry that we still use today. When he wrote his book, The Elements, he started with only several axioms, or givens. For example, he stated that there is only one line connecting two points, and that all right angles are equal.2 Then he built on these postulates, proving more and more theorems. But Euclid never used equations, and his 1 René Descartes, TheGeometry, Vol. 31 of Great Books of the Western World, ed. Robert Hutchins, (Chicago: Britannica, 1989), 298. 2 Euclid, The Thirteen Books of Euclid’s Elements, Vol. 11 of Great Books of the Western World, ed. Robert Hutchins, (Chicago: Britannica, 1989), 2.
(http://www.mdhc.org/files/579_Paper_Junior_Pritt.pdf)
Descartes’ Analytic Geometry: Plotting the Future of MathematicsRené Descartes dipped his quill pen into the ink. “This is one thing which I believe the ancient mathematicians did not observe,” he wrote, “for otherwise they would not have put so much labor into writing so many books in which the very sequence of the propositions shows that they did not have a sure method of finding all, but rather gathered together those propositions on which they had happened by accident.”1 What is the “thing” that the early mathematicians had missed? It was analytic geometry, a method invented by Descartes that used algebraic equations to describe geometric objects. Descartes discovered that he could solve difficult mathematical problems using this method. The key idea was to use coordinate axes to bring algebra and geometry together. This was an innovation that enabled mathematicians to solve complex problems and invent new forms of mathematics such as calculus, which laid the foundation for modern science and technology. The history of mathematics begins with geometry. Euclid, a Greek mathematician, lived around 300 BC in Alexandria, Egypt. He invented a form of geometry that we still use today. When he wrote his book, The Elements, he started with only several axioms, or givens. For example, he stated that there is only one line connecting two points, and that all right angles are equal.2 Then he built on these postulates, proving more and more theorems. But Euclid never used equations, and his 1 René Descartes, TheGeometry, Vol. 31 of Great Books of the Western World, ed. Robert Hutchins, (Chicago: Britannica, 1989), 298. 2 Euclid, The Thirteen Books of Euclid’s Elements, Vol. 11 of Great Books of the Western World, ed. Robert Hutchins, (Chicago: Britannica, 1989), 2.
(http://www.mdhc.org/files/579_Paper_Junior_Pritt.pdf)
Algebraic Geometry
Introduction to Algebraic Geometry Donu Arapura Blow up of y2=x3
In a sentence, algebraic geometry is the study of solutions to algebraic equations. People learning it for the first time, would see a lot of algebra, but not much geometry. But it is there. The picture above depicts a resolution of the singular curve y2=x3. This can be accomplished by taking integral closures on the algebra side, or by doing a blow up. This curve drawn in black is resolved by blowing up the plane at the origin (replacing the yellow by blue surface) and taking the closure of the preimage away from the origin (in red).
____>>>
Algebraic Geometry Algebraic geometry is the study of geometries that come from algebra, in particular, from rings. In classical algebraic geometry, the algebra is the ring of polynomials, and the geometry is the set of zeros of polynomials, called an algebraic variety. For instance, the unit circle is the set of zeros of and is an algebraic variety, as are all of the conic sections.
In the twentieth century, it was discovered that the basic ideas of classical algebraic geometry can be applied to any commutative ring with a unit, such as the integers. The geometry of such a ring is determined by its algebraic structure, in particular its prime ideals. Grothendieck defined schemes as the basic geometric objects, which have the same relationship to the geometry of a ring as a manifold to a coordinate chart. The language of category theory evolved at around the same time, largely in response to the needs of the increasing abstraction in algebraic geometry.
As a consequence, algebraic geometry became very useful in other areas of mathematics, most notably in algebraic number theory. For instance, Deligne used it to prove a variant of the Riemann hypothesis. Also, Andrew Wiles' proof of Fermat's last theorem used the tools developed in algebraic geometry.
In the latter part of the twentieth century, researchers have tried to extend the relationship between algebra and geometry to arbitrary noncommutative rings. The study of geometries associated to noncommutative rings is called noncommutative geometry.
In a sentence, algebraic geometry is the study of solutions to algebraic equations. People learning it for the first time, would see a lot of algebra, but not much geometry. But it is there. The picture above depicts a resolution of the singular curve y2=x3. This can be accomplished by taking integral closures on the algebra side, or by doing a blow up. This curve drawn in black is resolved by blowing up the plane at the origin (replacing the yellow by blue surface) and taking the closure of the preimage away from the origin (in red).
____>>>
Algebraic Geometry Algebraic geometry is the study of geometries that come from algebra, in particular, from rings. In classical algebraic geometry, the algebra is the ring of polynomials, and the geometry is the set of zeros of polynomials, called an algebraic variety. For instance, the unit circle is the set of zeros of and is an algebraic variety, as are all of the conic sections.
In the twentieth century, it was discovered that the basic ideas of classical algebraic geometry can be applied to any commutative ring with a unit, such as the integers. The geometry of such a ring is determined by its algebraic structure, in particular its prime ideals. Grothendieck defined schemes as the basic geometric objects, which have the same relationship to the geometry of a ring as a manifold to a coordinate chart. The language of category theory evolved at around the same time, largely in response to the needs of the increasing abstraction in algebraic geometry.
As a consequence, algebraic geometry became very useful in other areas of mathematics, most notably in algebraic number theory. For instance, Deligne used it to prove a variant of the Riemann hypothesis. Also, Andrew Wiles' proof of Fermat's last theorem used the tools developed in algebraic geometry.
In the latter part of the twentieth century, researchers have tried to extend the relationship between algebra and geometry to arbitrary noncommutative rings. The study of geometries associated to noncommutative rings is called noncommutative geometry.
CONICS
As a warm up, we start with a standard example y2 = x. When x,y are treated as real variables, this is simply a parabola opening sideways. Things get more interesting when the variables are allowed to take complex values. Since the graph would live in 2 complex or 4 real dimensions, it is impossible visualize completely. Nevertheless, we can get a sense of it projecting to 3 real dimensions, by setting x1 and x2 to be real and imaginary parts of x, and x3 to be the real part of y. ( We will use xi as coordinates of R3.) In polar coordinates, this gives
We can now plot the graph, using colour to encode the imaginary part of y. Here θ runs from 0 to 4π. Note that even though the surface appears to cross itself. We can see that it doesn't since the colours of sheets are different where they meet. In general, a conic is given by a quadratic equation f(x,y) = 0. The standard classification that one learns in highschool becomes simpler over the complex numbers, because now there is no difference between an ellipse and a hyperbola. To clarify this, we say that two conics are equivalent if we can transform one to the other by an affine transformation
where we require the abde matrix to be invertible. Then up to equivalence, there are only 4 possibilities
and then substitute θ = s + it. From standard identities, we obtain Plotting real and imaginary parts of x and the real part of y yields.
As a warm up, we start with a standard example y2 = x. When x,y are treated as real variables, this is simply a parabola opening sideways. Things get more interesting when the variables are allowed to take complex values. Since the graph would live in 2 complex or 4 real dimensions, it is impossible visualize completely. Nevertheless, we can get a sense of it projecting to 3 real dimensions, by setting x1 and x2 to be real and imaginary parts of x, and x3 to be the real part of y. ( We will use xi as coordinates of R3.) In polar coordinates, this gives
We can now plot the graph, using colour to encode the imaginary part of y. Here θ runs from 0 to 4π. Note that even though the surface appears to cross itself. We can see that it doesn't since the colours of sheets are different where they meet. In general, a conic is given by a quadratic equation f(x,y) = 0. The standard classification that one learns in highschool becomes simpler over the complex numbers, because now there is no difference between an ellipse and a hyperbola. To clarify this, we say that two conics are equivalent if we can transform one to the other by an affine transformation
where we require the abde matrix to be invertible. Then up to equivalence, there are only 4 possibilities
- A union of two lines.
- A double line.
- The parabola y2 = x.
- The circle x2 + y2 = 1
and then substitute θ = s + it. From standard identities, we obtain Plotting real and imaginary parts of x and the real part of y yields.
The above parameterization of the circle uses transcendental functions. There is another, perhaps less well known, parameterization using only rational functions. Naturally this is referred to as a rational parameterization. The idea is choose a point P on the circle, and parameterize the lines through it by their slope t. These should cut the circle in another point, which can then be expressed in terms of t. Picking P = (0,1), we see that t = (y - 1)∕x. Solving for y and then substituting into the equation for the circle gives
Supposing x is nonzero as is typical, we get We didn’t use these formulas for the plotting, because they are less convenient (we would need t = ∞ to complete the circle). However, it has other uses. Suppose that we wanted find all right angle triangles with integer sides. By Pythagoreas’ theorem, this equivalent to finding positive integer solutions for a2 + b2 = c2. Via the substitution x = a∕c, y = b∕c, this is amounts to finding points on the circle with positive rational coordinates. Here’s a very simple procedure: Choose a rational number -1 < t < 0, and substitute into the above formulas.
Supposing x is nonzero as is typical, we get We didn’t use these formulas for the plotting, because they are less convenient (we would need t = ∞ to complete the circle). However, it has other uses. Suppose that we wanted find all right angle triangles with integer sides. By Pythagoreas’ theorem, this equivalent to finding positive integer solutions for a2 + b2 = c2. Via the substitution x = a∕c, y = b∕c, this is amounts to finding points on the circle with positive rational coordinates. Here’s a very simple procedure: Choose a rational number -1 < t < 0, and substitute into the above formulas.
An Elliptic Curve
An elliptic curve Now we turn to cubic curves. The study of these was started by Isaac Newton, but the subject didn't really flourish until somewhat later after the advent of complex analysis. Typical cubics are referred to as elliptic curves, which is bit confusing since they are not actually ellipses. The reason for this name comes from its connection to elliptic integrals and functions, where an integral is called elliptic if the integrand contains a square root of cubic polynomial. Below are a few references in addition to the ones given earlier. A classical reference -- in spite of the name -- is Whittaker and Watson [3]. The first two books are more modern.
An elliptic curve Now we turn to cubic curves. The study of these was started by Isaac Newton, but the subject didn't really flourish until somewhat later after the advent of complex analysis. Typical cubics are referred to as elliptic curves, which is bit confusing since they are not actually ellipses. The reason for this name comes from its connection to elliptic integrals and functions, where an integral is called elliptic if the integrand contains a square root of cubic polynomial. Below are a few references in addition to the ones given earlier. A classical reference -- in spite of the name -- is Whittaker and Watson [3]. The first two books are more modern.
- Husemoeller, Elliptic curves,
- Silverman, The arithmetic of elliptic curves,
- Whittaker and Watson, A course in modern analysis.
The standard way to see this is by using elliptic functions. These are doubly periodic functions with the mildest possible (i.e. inessential) singularities. A function on the complex plane is doubly periodic if its graph repeats itself in both the horizontal and vertical directions. More precisely, we should be able to tile the plane into equally sized parallelograms (called period parallelograms), such that the piece of the graph over each tile is the same. The simplest nonzero example ( in spite of the complicated formula), with period parallelogram having corners at 0, α1,α2 and α1 + α2, is the Weierstrass ℘-function
Just as we used trignometric functions to parameterize the circle, we can use elliptic functions to parameterize elliptic curves. The above curve is given by the parameterization for t C , where the periods are expressed by the elliptic integrals (See [Whittaker-Watson, p. 444]). Since these parameterizing functions are doubly periodic, the elliptic curve can be identified with a period parallelogram (in fact a square in this case) with the sides glued together i.e. a torus. Note that the corners of the parallelogram get identified to the same point "at infinity" on the torus. At this point we can ask whether there exists a rational parameterization of an elliptic curve. The answer is NO. Suppose we could. Then it is possible to show that this extends to a finite to one map of the Riemann sphere (C ∪∞) onto a torus. But this is impossible. The justification of this last statement requires a bit of topology. A version of the Jordan curve theorem says that any closed curve on the sphere would seperate it into two parts (an interior and exterior). If we could find a map as above, we could conclude the Jordan curve holds for the torus: lift the curve up to the sphere and then map the interior/exterior back down. However, it is clear that this isn't true. Just look at the yellow or red curves above.
Even though, we now know the elliptic curve abstractly, we really want understand the way it is embedded into C2. As above, we can get a sense of it projecting to 3 real dimensions. The graph of
(http://www.math.purdue.edu/~dvb/graph/elliptic.html)
Just as we used trignometric functions to parameterize the circle, we can use elliptic functions to parameterize elliptic curves. The above curve is given by the parameterization for t C , where the periods are expressed by the elliptic integrals (See [Whittaker-Watson, p. 444]). Since these parameterizing functions are doubly periodic, the elliptic curve can be identified with a period parallelogram (in fact a square in this case) with the sides glued together i.e. a torus. Note that the corners of the parallelogram get identified to the same point "at infinity" on the torus. At this point we can ask whether there exists a rational parameterization of an elliptic curve. The answer is NO. Suppose we could. Then it is possible to show that this extends to a finite to one map of the Riemann sphere (C ∪∞) onto a torus. But this is impossible. The justification of this last statement requires a bit of topology. A version of the Jordan curve theorem says that any closed curve on the sphere would seperate it into two parts (an interior and exterior). If we could find a map as above, we could conclude the Jordan curve holds for the torus: lift the curve up to the sphere and then map the interior/exterior back down. However, it is clear that this isn't true. Just look at the yellow or red curves above.
Even though, we now know the elliptic curve abstractly, we really want understand the way it is embedded into C2. As above, we can get a sense of it projecting to 3 real dimensions. The graph of
(http://www.math.purdue.edu/~dvb/graph/elliptic.html)
Nodal and cuspidal curves
A point P of a curve f(x,y) = 0 is called nonsingular if the gradient ∇f does not vanish at P. In this case, the implicit function theorem tells us that near P, y can be expressed as a function of x or the other way around. Most of the curves considered previously (parabola, circle elliptic curve) consist entirely of nonsingular points. The degenerate conic consisting of two nonparallel lines has a singularity where they meet. It is easy to construct singular cubics with several components as a union of a conic and a line, or three lines. The nodal cubic [ y^2 - x^2(x+1)=0].
has a singular point at the origin, and it is irreducible meaning that it is not a union of other curves. From an algebraic point of view, this amounts to the irreducibility of the defining polynomial. The singularity is clearly visible from the graph over reals. Here we see two tangent directions at the origin instead of just one.
A point P of a curve f(x,y) = 0 is called nonsingular if the gradient ∇f does not vanish at P. In this case, the implicit function theorem tells us that near P, y can be expressed as a function of x or the other way around. Most of the curves considered previously (parabola, circle elliptic curve) consist entirely of nonsingular points. The degenerate conic consisting of two nonparallel lines has a singularity where they meet. It is easy to construct singular cubics with several components as a union of a conic and a line, or three lines. The nodal cubic [ y^2 - x^2(x+1)=0].
has a singular point at the origin, and it is irreducible meaning that it is not a union of other curves. From an algebraic point of view, this amounts to the irreducibility of the defining polynomial. The singularity is clearly visible from the graph over reals. Here we see two tangent directions at the origin instead of just one.
Now take a look at the outer edge of this picture.
The way it is drawn, it repeatedly crosses itself. But we know this really represents a defect of our depiction more than anything else. To get a better feeling for what this ought to look like, form the intersection of our cusp with a small sphere ∣x∣2 + ∣y∣2 = ε 2. This is called the link of the singularity. The sphere can be identified with R3 plus a point at infinity, and the link is a knot in this space. In this case, the link is a so called (2,5)-torus knot which looks as follows If we did this for a nonsingular point, we would have gotten an unknotted circle. So the amount of "knottedness" is really telling us how bad the singularity is.(http://www.math.purdue.edu/~dvb/graph/nodal.html)
The way it is drawn, it repeatedly crosses itself. But we know this really represents a defect of our depiction more than anything else. To get a better feeling for what this ought to look like, form the intersection of our cusp with a small sphere ∣x∣2 + ∣y∣2 = ε 2. This is called the link of the singularity. The sphere can be identified with R3 plus a point at infinity, and the link is a knot in this space. In this case, the link is a so called (2,5)-torus knot which looks as follows If we did this for a nonsingular point, we would have gotten an unknotted circle. So the amount of "knottedness" is really telling us how bad the singularity is.(http://www.math.purdue.edu/~dvb/graph/nodal.html)
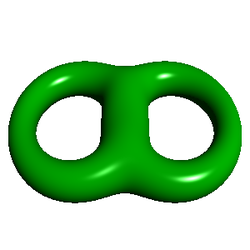
HIGHER GENUS CURVE
Higher Genus Curves We have seen how to construct spheres and tori along with various singular objects. We now want to consider curves with large genus (i.e. many holes). A genus two surface or "two-holed doughnut" is depicted below The basic idea would be to use higher degree equations. Consider the quartic equation
(y^2-x(x-1) (x-2)) (5y-x) + €x=0
consider the hyperelliptic curve X defined by an equation y2 = p(x) where p(x) has an odd degree, say n, with distinct roots. We give a formula (due to Riemann and Hurwitz) for the genus g of X. We triangulate C ∪{∞} so that the roots of p(x) and ∞ are included among the vertices. Let’s say that there are V verticies, E edges and F faces. So that V - E + F = 2. The preimage of this triangulation gives a triangulation of X with V ′ vertices etcetera. We have V ′- E′ + F′ = 2 - 2g. The map from X → C ∪{∞} is two to one except at vertices lying over the roots and ∞ where it one to one. Thus V ′ = 2V - n - 1, E′ = 2E, F′ = 2F, so that Although the definition is topological, it turns out that the genus is strongly connected to the complex function theory of a curve. The relationship is given by the Riemann-Roch theorem. We will explain a special case. First observe that a holomorphic function on a compact connected complex curve X is necessarily constant.
Proof: Since X is compact, the modulus of the function must attain a maximum at some point p. By the maximum modulus principle the function must be constant in a neighbourhood of p. This implies that f = f(p) everywhere since the difference has nonisolated zero.
Therefore nonconstant meromorphic functions on X must have singularities. Which raises the question, what are simplest possible singularities? Choose points p1,…pk X and positive integers n1,…nk. Then the Riemann-Roch theorem tells us that there is a nonconstant function with poles only at pi of order at most ni, provided that n1 + … + nk > g. A standard proof uses a refined form of the Euler characteristic.
Higher Genus Curves We have seen how to construct spheres and tori along with various singular objects. We now want to consider curves with large genus (i.e. many holes). A genus two surface or "two-holed doughnut" is depicted below The basic idea would be to use higher degree equations. Consider the quartic equation
(y^2-x(x-1) (x-2)) (5y-x) + €x=0
consider the hyperelliptic curve X defined by an equation y2 = p(x) where p(x) has an odd degree, say n, with distinct roots. We give a formula (due to Riemann and Hurwitz) for the genus g of X. We triangulate C ∪{∞} so that the roots of p(x) and ∞ are included among the vertices. Let’s say that there are V verticies, E edges and F faces. So that V - E + F = 2. The preimage of this triangulation gives a triangulation of X with V ′ vertices etcetera. We have V ′- E′ + F′ = 2 - 2g. The map from X → C ∪{∞} is two to one except at vertices lying over the roots and ∞ where it one to one. Thus V ′ = 2V - n - 1, E′ = 2E, F′ = 2F, so that Although the definition is topological, it turns out that the genus is strongly connected to the complex function theory of a curve. The relationship is given by the Riemann-Roch theorem. We will explain a special case. First observe that a holomorphic function on a compact connected complex curve X is necessarily constant.
Proof: Since X is compact, the modulus of the function must attain a maximum at some point p. By the maximum modulus principle the function must be constant in a neighbourhood of p. This implies that f = f(p) everywhere since the difference has nonisolated zero.
Therefore nonconstant meromorphic functions on X must have singularities. Which raises the question, what are simplest possible singularities? Choose points p1,…pk X and positive integers n1,…nk. Then the Riemann-Roch theorem tells us that there is a nonconstant function with poles only at pi of order at most ni, provided that n1 + … + nk > g. A standard proof uses a refined form of the Euler characteristic.
For small nonzero ε this is gives the nonsingular curve graphed in red. However, when ε =0, this is a reducible curve which is a union of a nonsingular cubic (blue) and a line (green).
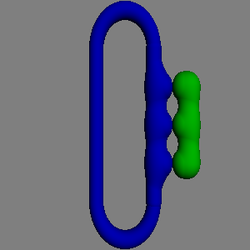
When the points of infinity are added, we get a line meeting the cubic in 3 points. The complex picture of this reducible curve looks something like this:
In general if g(d) is the genus of a degree d nonsingular curve, then proceeding as above, we obtain a nonsingular genus d +1 curve by "smoothing" the union of a genus d curve and a line. The line meets the degree d curve in d points, so this leads to an inductive formula [g(d+1)=g(d)+d-1]
In general if g(d) is the genus of a degree d nonsingular curve, then proceeding as above, we obtain a nonsingular genus d +1 curve by "smoothing" the union of a genus d curve and a line. The line meets the degree d curve in d points, so this leads to an inductive formula [g(d+1)=g(d)+d-1]
EULER CHARACTERISTIC AND GENUS
In general if g(d) is the genus of a degree d nonsingular curve, then proceeding as above, we obtain a nonsingular genus d +1 curve by "smoothing" the union of a genus d curve and a line. The line meets the degree d curve in d points, so this leads to an inductive formula [g(d+1)=g(d)+d-1]
V - E + F =2
In general if g(d) is the genus of a degree d nonsingular curve, then proceeding as above, we obtain a nonsingular genus d +1 curve by "smoothing" the union of a genus d curve and a line. The line meets the degree d curve in d points, so this leads to an inductive formula [g(d+1)=g(d)+d-1]
V - E + F =2
Geometry Library
Points
Points are the basis of all Geometry. There are so many things you can do with the little buggers that the possibilities are endless. Points are zero-dimensional. That basically means that they have no height, length, or width. They are just there.
There are four main definitions of a point. They are the dot, the exact location, the ordered pair, and the node. A point has four definitions because, over the years, many different mathematicians have come up with their own ideas as to what a point should be. Since their ideas were all equally true, the point was given four main definitions instead of a single definition. In fact, the point is considered undefined for that reason (among others). When being written out, points are always represented by a capitol letter. If a point is on a line, it is often represented by the same letter.
The first definition of a point is the dot. This was probably the first kind of point ever thought up. You see, a dot has size - it has a definite, measureable, length and width. Probably the best example of a dot today would be the pixel. Yup, that's right - a pixel. Those tiny spots of color that make up your computer screen. A matrix is a rectangular array made up of lots of pixels, so that's what your computer screen is. As you most likely know, the more pixel in a computer or TV screen, the better the resolution.
The second definition of a point is an exact location. The exact location is the perfect example of the normal, zero-dimensional point. No matter how much you zoom in, there will always be another point in between two others. This definition of a point was discovered sometime between 550 B.C. and 150 A.D. One example of where these are used in real life is in measuring distances, especially between two cities. Some cities are more than a mile across, so mapmakers have to pick one exact location in the city to measure from. One use of the exact location ties in with the the next definition, the ordered pair. The number line, or coordinatized line, is a line where every point is represented by a number and vice versa.
The third definition of a point is the ordered pair. The ordered pair was discoverd around 1630 A.D. by two mathematicians named Pierre de Fermat and René Descartes. You've probably heard of the latter before. Basically, an ordered pair is a pair of numbers in parentheses used to locate an exact location on a coordinate plane. The first number, represented by the variable x, tells you how far along the x-axis the point is(to the right or left, depending on the "polarity"/direction of the variable). The second number does the same, just along the y-axis (up and down). Ordered pairs that consist of whole numbers are called lattice points. Numbers in a number line, coordinate plane, or coordinate space, have both magnitude and direction. Magnitude is its distance from the origin, and direction is its positivity or negativity. The origin is the center of any graph. It marks the place where the measurements start. Everything one one side is positive, and everything along the other side is negative. The origin extends its "neutrality" along lines called the x, y, and z-axes. These lines need only one variable to represent them. The variable whose name they carry is the one that represents them, and its value is always zero. The picture below shows you what I mean.
The last definition of the point is the node. A node is a type of point thatis zero-dimensional, and two nodes can have more than one line between them. Nodes exist only in networks, which are a series of nodes and arcs. Arcs are lines that may curve and aren't dense. Arcs only contain their endpoints. There is a special kind of network in which all arcs can be crossed without going over one more than once. It is called a traversible network. Another kind of network is a graceful network. This kind of network is really hard to make is and is great for extra credit projects. To make a network graceful with x arcs, you must label each node with a number from 0 to x so that, if you find the positive difference of two connecting nodes and label their common arc with it, all arcs are labeled from 1 to x. If a node has an even number if arcs going through it, it is called an even node. An odd node is just the opposite. Nodes are sometimes called vertices.
Four important characteristics help to distinguish the different definitions of points:
"RECOLLECT, v. To recall with additions something not previously known" - Ambrose Bierce, "The Devil's Dictionary"
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Lines, Planes, & Space
Lines
A line is a one-dimensional figure. That is, a line has length, but no width or height. Basically, a line is made up of an infinite number of points. Points in the same line are called colinear. Between each point is another point. This continues on forever. You can never run out of points to discover in a line. However, when you are talking about points as dots, you can get something called a discrete line. A discrete line is a line made up of dots with space between the centers of the dots. A dense line is a line that is the shortest path between two points. The number line, or coordinatized line, is a line where every point is represented by a number and vice versa. The number line is a one-dimensional graph. See the paragraph about nodes to find out about networks and arcs.
If you have two points A and B, the line that contains them is the set of points consisting of the distinct points A and B, all of the points between them, all points for which A is between them and B, and all points for which B is between them and A. A line like that would be written . A line, if not made up by previously known points, can be represented by a single lowercase letter. This is as a contrast to the uppercase letters that represent points. A line segment is the set of points consisting of A, B, and all points between them. A line segment is written . If you have two points A and B, the ray that contains them is the set of points consisting of the distinct points A and B, all of the points between them, and all points for which B is between them and A. This is written .
Every line is either horizontal, vertical or oblique. Horizontal and vertical speak for themselves, and an oblique line is any line that isn't horizontal or vertical. Horizontal lines have a slope of zero. Vertical lines are said to have infinite slope, because they just go straight up and not over. People just can't stand that zero in the denominator. Here's something I bet you didn't know: In space, vertical lines never meet (they just go straight up/down), but it is possible for horizontal lines to meet (check out the corner of the ceiling - two horizontal lines meet there (the edge of the two walls)). Okay, so maybe you did know that.
There are four different relationships that two lines can have. Lines can be identical, intersecting, parallel, perpendicular, or skew. Identical lines are lines that coincide. Therefore, they are the same line. The second one is the most obvious. Intersecting lines are lines that share a point. Parallel lines are coplanar lines that never intersect. They always have a certain distance between them and always have the same direction. See the page on parallel lines for more information. Perpendicular lines are lines that intersect in one point and form a 90 degree angle while they're at it. They have a page of their own, too. Skew lines only happen in space. They are noncoplanar lines that never intersect. Unlike parallel lines, however, they don't always have a set distance between them, nor do they always have the same direction.
Planes
Planes are two-dimensional. A plane has length and width, but no height, and extends infinitely on all sides. Planes are thought of as flat surfaces, like a table top. A plane is made up of an infinite amount of lines. Two-dimensional figures are called plane figures. While this really should be in Algebra, coordinate planes are two-dimensional graphs that use the ordered pair to locate points. Another name for coordinate planes are Cartesian planes.
.Space
There's been a request to add something about space here. Space is the set of all points. It is made up of an infinite number of planes.Figures in space are called solids or surfaces. Coordinate space uses three coordinates. Instead of an ordered pair, an ordered triple is used. The new variable, z, measures the distance forwards or backwards that you move. The ordered triple looks like this: (x, y, z). You might see more on space and 3-D figures later, in a different section.
- Jaime III
"Give me a fruitful error anytime, full of seeds, bursting with its own corrections. You can keep your sterile truth for yourself." - Vilfredo Pareto
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Postulates and Theorems
Postulates
Postulates are statements that are assumed to be true without proof. Postulates serve two purposes - to explain undefined terms, and to serve as a starting point for proving other statements.
Point-Line-Plane Postulate
A) Unique Line Assumption: Through any two points, there is exactly one line.
Note: This doesn't apply to nodes or dots.
B) Dimension Assumption: Given a line in a plane, there exists a point in the plane not on that line. Given a plane in space, there exists a line or a point in space not on that plane.
C) Number Line Assumption: Every line is a set of points that can be put into a one-to-one correspondence with real numbers, with any point on it corresponding to zero and any other point corresponding to one.
Note: This doesn't apply to nodes or dots. This was once called the Ruler Postulate.
D) Distance Assumption: On a number line, there is a unique distance between two points.
E) If two points lie on a plane, the line containing them also lies on the plane.
F) Through three noncolinear points, there is exactly one plane.
G) If two different planes have a point in common, then their intersection is a line.
Euclid's Postulates
A) Two points determine a line segment.
B) A line segment can be extended indefinitely along a line.
C) A circle can be drawn with a center and any radius.
D) All right angles are congruent.
Note: This part has been proven as a theorem. See below, proof.
E) If two lines are cut by a transversal, and the interior angles on the same side of the transversal have a total measure of less than 180 degrees, then the lines will intersect on that side of the transversal.
Polygon Inequality Postulates
Triangle Inequality Postulate: The sum of the lengths of two sides of any triangle is greater than the length of the third side.
Quadrilateral Inequality Postulate: The sum of the lengths of 3 sides of any quadrilateral is greater than the length of the fourth side.
Theorems
Theorums are statements that can be deduced and proved from definitions, postulates, and previously proved theorums. Euclid's First Theorem: The triangle in the picture is an equilateral triangle. See construction/proof at http://aleph0.clarku.edu/~djoyce/java/elements/elements.html.
Note: D. Joyce's Elements page (the link above) is where you'll find anything else you need to know about Euclid's ideas, postulates, and theorems.
Line Intersection Theorem: Two different lines intersect in at most one point. For proof see Unique Line Assumption
Betweenness Theorem: If C is between A and B and on , then AC + CB = AB.
Related Theorems:
Theorem: If A, B, and C are distinct points and AC + CB = AB, then C lies on .
Theorem: For any points A, B, and C, AC + CB .
Pythagorean Theorem: a2 + b2 = c2, if c is the hypotenuse.
Right Angle Congruence Theorem: All right angles are congruent. See proof.
Note: While you can usually get away with not knowing the names of theorems, your Geometry teacher will generally require you to know them. - Jaime III
"Not failure, but low aim, is a crime." - James Russel Lowell
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Understanding Proofs
This page is all about understanding proofs. First of all, a proof is a series of sequential steps of justified conclusions. The conclusions are justified by either a definition, a postulate or a previously proved theorem.
In a proof the first thing you see (other than the name of the theorem) is the given. The given is the information that you have to start with. This usually includes a picture of a figure. Often it is something like "a b with transversal t." From there, you must figure out what information applies in terms of applicable definitions, postulates, and previously proved theorems.
Sometimes teachers will ask you to include what you are trying to prove under the given. I've left that step out on all of my proofs, as it is unnecessary. If you really want to know what is going to be proved, read the theorem listed at the top of that proof's page.
In the actual proof itself, the information is divided into two categories: Statements/Conclusion and Justifications. Since a proof is written like a table, the columns are usually given these labels. While the most common way to write a proof is to have the categories divided between two columns, it can be written the other way (horizontally). (Confused yet?) In HTML, I usually label them as Table Headers (<TH>).
The first step you write down is the given. After that you just go through the routine of writing down the different statements and their justifications. At the end, you write your conclusion - what you're trying to prove. Sometimes you'll come across a step that seems redundant. While you don't always have to include them in your proof, you should until your teacher tells you otherwise. Many teachers I know would mark off points for excluding something small like that.
One thing that seems to catch many people is the similarity between the Substitution Property and the Transitive Property. However, there is a distinct difference. Check them out for yourself. Sometimes either can be used in a proof, but most often its either one or the other. Substitution is for replacing parts that are known to be equal and Transitive is for showing equality between two previously unrelated things.
My tables usually look like this:
Statements/Conclusion Justification 1) Insert given here. 1) The justification is that it is given. 2) First point. 2) First justification. 3) Second point. 3) Second justification. And so on until... 9) The conclusion. 9) The final justification. I usually have ALIGN=CENTER, BORDER=1, FRAME=BOX, and RULES=COLS. Some of that is probably redundant, but that's OK if it gets the job done. CELLPADDING doesn't seem to work yet, but put that at one anyways. It's your choice; use what you want. There are eight completed theorem proofs available at this website. They are:
"One can never consent to crawl when one feels the impulse to soar." - Helen Keller
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Points are the basis of all Geometry. There are so many things you can do with the little buggers that the possibilities are endless. Points are zero-dimensional. That basically means that they have no height, length, or width. They are just there.
There are four main definitions of a point. They are the dot, the exact location, the ordered pair, and the node. A point has four definitions because, over the years, many different mathematicians have come up with their own ideas as to what a point should be. Since their ideas were all equally true, the point was given four main definitions instead of a single definition. In fact, the point is considered undefined for that reason (among others). When being written out, points are always represented by a capitol letter. If a point is on a line, it is often represented by the same letter.
The first definition of a point is the dot. This was probably the first kind of point ever thought up. You see, a dot has size - it has a definite, measureable, length and width. Probably the best example of a dot today would be the pixel. Yup, that's right - a pixel. Those tiny spots of color that make up your computer screen. A matrix is a rectangular array made up of lots of pixels, so that's what your computer screen is. As you most likely know, the more pixel in a computer or TV screen, the better the resolution.
The second definition of a point is an exact location. The exact location is the perfect example of the normal, zero-dimensional point. No matter how much you zoom in, there will always be another point in between two others. This definition of a point was discovered sometime between 550 B.C. and 150 A.D. One example of where these are used in real life is in measuring distances, especially between two cities. Some cities are more than a mile across, so mapmakers have to pick one exact location in the city to measure from. One use of the exact location ties in with the the next definition, the ordered pair. The number line, or coordinatized line, is a line where every point is represented by a number and vice versa.
The third definition of a point is the ordered pair. The ordered pair was discoverd around 1630 A.D. by two mathematicians named Pierre de Fermat and René Descartes. You've probably heard of the latter before. Basically, an ordered pair is a pair of numbers in parentheses used to locate an exact location on a coordinate plane. The first number, represented by the variable x, tells you how far along the x-axis the point is(to the right or left, depending on the "polarity"/direction of the variable). The second number does the same, just along the y-axis (up and down). Ordered pairs that consist of whole numbers are called lattice points. Numbers in a number line, coordinate plane, or coordinate space, have both magnitude and direction. Magnitude is its distance from the origin, and direction is its positivity or negativity. The origin is the center of any graph. It marks the place where the measurements start. Everything one one side is positive, and everything along the other side is negative. The origin extends its "neutrality" along lines called the x, y, and z-axes. These lines need only one variable to represent them. The variable whose name they carry is the one that represents them, and its value is always zero. The picture below shows you what I mean.
The last definition of the point is the node. A node is a type of point thatis zero-dimensional, and two nodes can have more than one line between them. Nodes exist only in networks, which are a series of nodes and arcs. Arcs are lines that may curve and aren't dense. Arcs only contain their endpoints. There is a special kind of network in which all arcs can be crossed without going over one more than once. It is called a traversible network. Another kind of network is a graceful network. This kind of network is really hard to make is and is great for extra credit projects. To make a network graceful with x arcs, you must label each node with a number from 0 to x so that, if you find the positive difference of two connecting nodes and label their common arc with it, all arcs are labeled from 1 to x. If a node has an even number if arcs going through it, it is called an even node. An odd node is just the opposite. Nodes are sometimes called vertices.
Four important characteristics help to distinguish the different definitions of points:
- Unique line - Do the points determine a single line?
- Dimension - Are the points without size?
- Number line - Can the points of a line be put into a one-to-one correspondece with real numbers?
- Distance - Is there a unique distance between two points?
"RECOLLECT, v. To recall with additions something not previously known" - Ambrose Bierce, "The Devil's Dictionary"
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Lines, Planes, & Space
Lines
A line is a one-dimensional figure. That is, a line has length, but no width or height. Basically, a line is made up of an infinite number of points. Points in the same line are called colinear. Between each point is another point. This continues on forever. You can never run out of points to discover in a line. However, when you are talking about points as dots, you can get something called a discrete line. A discrete line is a line made up of dots with space between the centers of the dots. A dense line is a line that is the shortest path between two points. The number line, or coordinatized line, is a line where every point is represented by a number and vice versa. The number line is a one-dimensional graph. See the paragraph about nodes to find out about networks and arcs.
If you have two points A and B, the line that contains them is the set of points consisting of the distinct points A and B, all of the points between them, all points for which A is between them and B, and all points for which B is between them and A. A line like that would be written . A line, if not made up by previously known points, can be represented by a single lowercase letter. This is as a contrast to the uppercase letters that represent points. A line segment is the set of points consisting of A, B, and all points between them. A line segment is written . If you have two points A and B, the ray that contains them is the set of points consisting of the distinct points A and B, all of the points between them, and all points for which B is between them and A. This is written .
Every line is either horizontal, vertical or oblique. Horizontal and vertical speak for themselves, and an oblique line is any line that isn't horizontal or vertical. Horizontal lines have a slope of zero. Vertical lines are said to have infinite slope, because they just go straight up and not over. People just can't stand that zero in the denominator. Here's something I bet you didn't know: In space, vertical lines never meet (they just go straight up/down), but it is possible for horizontal lines to meet (check out the corner of the ceiling - two horizontal lines meet there (the edge of the two walls)). Okay, so maybe you did know that.
There are four different relationships that two lines can have. Lines can be identical, intersecting, parallel, perpendicular, or skew. Identical lines are lines that coincide. Therefore, they are the same line. The second one is the most obvious. Intersecting lines are lines that share a point. Parallel lines are coplanar lines that never intersect. They always have a certain distance between them and always have the same direction. See the page on parallel lines for more information. Perpendicular lines are lines that intersect in one point and form a 90 degree angle while they're at it. They have a page of their own, too. Skew lines only happen in space. They are noncoplanar lines that never intersect. Unlike parallel lines, however, they don't always have a set distance between them, nor do they always have the same direction.
Planes
Planes are two-dimensional. A plane has length and width, but no height, and extends infinitely on all sides. Planes are thought of as flat surfaces, like a table top. A plane is made up of an infinite amount of lines. Two-dimensional figures are called plane figures. While this really should be in Algebra, coordinate planes are two-dimensional graphs that use the ordered pair to locate points. Another name for coordinate planes are Cartesian planes.
.Space
There's been a request to add something about space here. Space is the set of all points. It is made up of an infinite number of planes.Figures in space are called solids or surfaces. Coordinate space uses three coordinates. Instead of an ordered pair, an ordered triple is used. The new variable, z, measures the distance forwards or backwards that you move. The ordered triple looks like this: (x, y, z). You might see more on space and 3-D figures later, in a different section.
- Jaime III
"Give me a fruitful error anytime, full of seeds, bursting with its own corrections. You can keep your sterile truth for yourself." - Vilfredo Pareto
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Postulates and Theorems
Postulates
Postulates are statements that are assumed to be true without proof. Postulates serve two purposes - to explain undefined terms, and to serve as a starting point for proving other statements.
Point-Line-Plane Postulate
A) Unique Line Assumption: Through any two points, there is exactly one line.
Note: This doesn't apply to nodes or dots.
B) Dimension Assumption: Given a line in a plane, there exists a point in the plane not on that line. Given a plane in space, there exists a line or a point in space not on that plane.
C) Number Line Assumption: Every line is a set of points that can be put into a one-to-one correspondence with real numbers, with any point on it corresponding to zero and any other point corresponding to one.
Note: This doesn't apply to nodes or dots. This was once called the Ruler Postulate.
D) Distance Assumption: On a number line, there is a unique distance between two points.
E) If two points lie on a plane, the line containing them also lies on the plane.
F) Through three noncolinear points, there is exactly one plane.
G) If two different planes have a point in common, then their intersection is a line.
Euclid's Postulates
A) Two points determine a line segment.
B) A line segment can be extended indefinitely along a line.
C) A circle can be drawn with a center and any radius.
D) All right angles are congruent.
Note: This part has been proven as a theorem. See below, proof.
E) If two lines are cut by a transversal, and the interior angles on the same side of the transversal have a total measure of less than 180 degrees, then the lines will intersect on that side of the transversal.
Polygon Inequality Postulates
Triangle Inequality Postulate: The sum of the lengths of two sides of any triangle is greater than the length of the third side.
Quadrilateral Inequality Postulate: The sum of the lengths of 3 sides of any quadrilateral is greater than the length of the fourth side.
Theorems
Theorums are statements that can be deduced and proved from definitions, postulates, and previously proved theorums. Euclid's First Theorem: The triangle in the picture is an equilateral triangle. See construction/proof at http://aleph0.clarku.edu/~djoyce/java/elements/elements.html.
Note: D. Joyce's Elements page (the link above) is where you'll find anything else you need to know about Euclid's ideas, postulates, and theorems.
Line Intersection Theorem: Two different lines intersect in at most one point. For proof see Unique Line Assumption
Betweenness Theorem: If C is between A and B and on , then AC + CB = AB.
Related Theorems:
Theorem: If A, B, and C are distinct points and AC + CB = AB, then C lies on .
Theorem: For any points A, B, and C, AC + CB .
Pythagorean Theorem: a2 + b2 = c2, if c is the hypotenuse.
Right Angle Congruence Theorem: All right angles are congruent. See proof.
Note: While you can usually get away with not knowing the names of theorems, your Geometry teacher will generally require you to know them. - Jaime III
"Not failure, but low aim, is a crime." - James Russel Lowell
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Understanding Proofs
This page is all about understanding proofs. First of all, a proof is a series of sequential steps of justified conclusions. The conclusions are justified by either a definition, a postulate or a previously proved theorem.
In a proof the first thing you see (other than the name of the theorem) is the given. The given is the information that you have to start with. This usually includes a picture of a figure. Often it is something like "a b with transversal t." From there, you must figure out what information applies in terms of applicable definitions, postulates, and previously proved theorems.
Sometimes teachers will ask you to include what you are trying to prove under the given. I've left that step out on all of my proofs, as it is unnecessary. If you really want to know what is going to be proved, read the theorem listed at the top of that proof's page.
In the actual proof itself, the information is divided into two categories: Statements/Conclusion and Justifications. Since a proof is written like a table, the columns are usually given these labels. While the most common way to write a proof is to have the categories divided between two columns, it can be written the other way (horizontally). (Confused yet?) In HTML, I usually label them as Table Headers (<TH>).
The first step you write down is the given. After that you just go through the routine of writing down the different statements and their justifications. At the end, you write your conclusion - what you're trying to prove. Sometimes you'll come across a step that seems redundant. While you don't always have to include them in your proof, you should until your teacher tells you otherwise. Many teachers I know would mark off points for excluding something small like that.
One thing that seems to catch many people is the similarity between the Substitution Property and the Transitive Property. However, there is a distinct difference. Check them out for yourself. Sometimes either can be used in a proof, but most often its either one or the other. Substitution is for replacing parts that are known to be equal and Transitive is for showing equality between two previously unrelated things.
My tables usually look like this:
Statements/Conclusion Justification 1) Insert given here. 1) The justification is that it is given. 2) First point. 2) First justification. 3) Second point. 3) Second justification. And so on until... 9) The conclusion. 9) The final justification. I usually have ALIGN=CENTER, BORDER=1, FRAME=BOX, and RULES=COLS. Some of that is probably redundant, but that's OK if it gets the job done. CELLPADDING doesn't seem to work yet, but put that at one anyways. It's your choice; use what you want. There are eight completed theorem proofs available at this website. They are:
- Linear Pair Theorem Proof
- Vertical Angle Theorem Proof
- Two Pependiculars Theorem Proof
- Perpendicular to Parallels Theorem Proof
- Alternate Exterior Angles Theorem Proof
- Alternate Interior Angles Theorem Proof
- Interior Angles Theorem Proof
- Right Angle Congruence Theorem Proof
"One can never consent to crawl when one feels the impulse to soar." - Helen Keller
(http://library.thinkquest.org/2647/geometry/geometry.htm)
Angles and Lines
Angles & Their MeasuresA definition of an angle would be that an angle is the union of two rays that have the same endpoint. The sides of the angles are the two rays, while the vertex is their common endpoint. stands for an angle. You can put it in front of three letters which represent points. The first and third letters represent points on each of the rays that form one of the sides. The middle letter represents the vertex. As you can see in the diagram, each point is represented in the written form. The letters can go either way - that is, first and last letter are interchangeable. So, that angle could either be ABC or CBA. Since B is the vertex, it is always in the middle of the two letters. You can also name an angle by just the letter of its vertex. So, for the example in the picture, the angle could also be labeled B. That's only if there are no other angles that share the same vertex. There is a third way to label angles. In the third way, each angle is designated with a number, so the example could be labeled 1 or 2 or whatever you wanted.Angles are measured in degrees. The number of degrees tell you how wide open the angle is. You can measure angles with a protracter, and you can buy them at just about any store that carries school items. Degrees are marked by a ° symbol. For those of you whose browsers can't interpret that, a degree symbol looks like this: . I tend to just write it out instead of using the symbol because it's quicker on the computer. There are up to 360 degrees in an angle. As you can see in the picture below, the 360 degrees form a circle.
There are a few more basic things you should know about angles. First of all, the space inside an angle of less than 180 degrees, is a convex set, while the space outside of one is a nonconvex set. The opposite is true for an angle of more than 180 degrees (but less than 360 degrees). The side of an angle that is started at would be called the initial side, and the side that an angle ended at would be called the terminal side. The measure of ABC is written mABC.
When measuring angles, you usually go counterclockwise, starting where the 3 would be on a clock. That would be called a zero angle because there is nothing in it - just a single ray going directly to the right. The next important type of angle is called the acute angle. An acute angle is an angle whose measure is inbetween 0 and 90 degrees. An example would be the 45 degree angle in the picture. The next important type of angle is the right angle. This is probably the most important type of angle there is because of all the spifty things that you can do with one. I won't go into all of them here. (I have to save something for later articles!) A right angle is an angle whose measure is exactly 90 degrees. Continuing around the circle, next is the obtuse angle. An obtuse angle is an angle whose measure is inbetween 90 and 180 degrees. The 135 degree angle in the diagram is an example. The last major kind of angle is the straight angle. A straight angle is an angle that measures exactly 180 degrees. Thus the name - the two rays form a straight line. A negative angle is also possible. This just means that you go clockwise instead of counterclockwise.
A lot of geometry teachers don't go beyond that, at least at first. There isn't much else left to explain, but I'll give it a shot. After straight angles, there aren't any more special angles that you need to know about. A 360 degree angle is an angle that does a full circle. It looks just like a zero angle, but instead of having no degrees, it has 360 of them. (Duh. You can't get more basic than that!)
It is possible to have an angle with more than 360 degrees. To find out what it looks like, all you do is subtract 360 from it until you have an angle less than or equal to 360. (What?! You want an example? C'mon, you people...) For example, if you have an angle that is 546 degrees, you subtract 360 from 546 to get 186. Thus, the angle is the equivalent of a 186 degree angle.
There are a few more terms that you should also know.
Supplementary angles are two angles whose measures combined equal 180 degrees.
Complementary angles are two angles whose measures combined equal 90 degrees.
Two non-straight and non-zero angles are adjacent if and only if a common side is in the interior of the angle formed by the non-common sides. A linear pair is a pair of adjacent angles whose non-common sides are opposite rays.
Vertical angles are two angles that have a common vertex and whose sides form two lines. is a bisector of DAC if and only if is in the interior of DAC and mDAB = mCAB.
Angle Measure Postulate
A) Unique Measure Assumption: Every angle has a unique measure. The measure could be infinite or negative.
B) Two Sides of a Line Assumption: Given any ray and any number x, there are unique rays and such that intersects ray and mBEA = mCEA = x.
C) Zero Angle Assumption: If and are the same ray, then mAEB = 0.
D) Straight Angle Assumption: If and are opposite rays, then mAEB = 180.
E) Angle Addition Assumption: If (except for point E) is in the interior of AEB, then mAEC + mCEB = mAEB.
Theorems
Linear Pair Theorum: If two angles form a linear pair, then they are supplementary. See proof.
Vertical Angle Theorum: If two angles are vertical angles, then they have equal measures. See proof.Note: While you can usually get away with not knowing the names of theorums, your Geometry teacher will generally require you to know them.
Parallel Lines
Parallel lines are two coplanar lines that never intersect. They always have an equal distance between them. stands for "is parallel to". That's all there is to it. However, parallel lines AND angles, well, that's a different story. There are lots of postulates and theorums that have to do with them.
Postulates
Corresponding Angles Postulate: If two coplanar lines are cut by a transversal so that two corresponding angles have the same measure, then those lines are parallel.
Parallel Lines Postulate: If two lines are parallel and are cut by a transversal, corresponding angles have the same measure.
Theorems
Alternate Exterior Angles Theorum: If two parallel lines are cut by a transversal, the alternate exterior angles are congruent. See proof.
Alternate Interior Angles Theorum: If two parallel lines are cut by a transversal, the alternate interior angles are congruent. See proof.
Interior Angle Theorum: If two parallel lines are cut by a transversal, interior angles on the same side of the transveral are supplementary. See proof.
Note: Your teachers may not recognize the names of the above theorums.
Parallel Lines and Slopes Theorum: Two nonvertical lines are parallel if and only if they have the same slope.
Transivity of Parallelism Theorum: In a plane, if l m and m n, than l n.
There are a few more basic things you should know about angles. First of all, the space inside an angle of less than 180 degrees, is a convex set, while the space outside of one is a nonconvex set. The opposite is true for an angle of more than 180 degrees (but less than 360 degrees). The side of an angle that is started at would be called the initial side, and the side that an angle ended at would be called the terminal side. The measure of ABC is written mABC.
When measuring angles, you usually go counterclockwise, starting where the 3 would be on a clock. That would be called a zero angle because there is nothing in it - just a single ray going directly to the right. The next important type of angle is called the acute angle. An acute angle is an angle whose measure is inbetween 0 and 90 degrees. An example would be the 45 degree angle in the picture. The next important type of angle is the right angle. This is probably the most important type of angle there is because of all the spifty things that you can do with one. I won't go into all of them here. (I have to save something for later articles!) A right angle is an angle whose measure is exactly 90 degrees. Continuing around the circle, next is the obtuse angle. An obtuse angle is an angle whose measure is inbetween 90 and 180 degrees. The 135 degree angle in the diagram is an example. The last major kind of angle is the straight angle. A straight angle is an angle that measures exactly 180 degrees. Thus the name - the two rays form a straight line. A negative angle is also possible. This just means that you go clockwise instead of counterclockwise.
A lot of geometry teachers don't go beyond that, at least at first. There isn't much else left to explain, but I'll give it a shot. After straight angles, there aren't any more special angles that you need to know about. A 360 degree angle is an angle that does a full circle. It looks just like a zero angle, but instead of having no degrees, it has 360 of them. (Duh. You can't get more basic than that!)
It is possible to have an angle with more than 360 degrees. To find out what it looks like, all you do is subtract 360 from it until you have an angle less than or equal to 360. (What?! You want an example? C'mon, you people...) For example, if you have an angle that is 546 degrees, you subtract 360 from 546 to get 186. Thus, the angle is the equivalent of a 186 degree angle.
There are a few more terms that you should also know.
Supplementary angles are two angles whose measures combined equal 180 degrees.
Complementary angles are two angles whose measures combined equal 90 degrees.
Two non-straight and non-zero angles are adjacent if and only if a common side is in the interior of the angle formed by the non-common sides. A linear pair is a pair of adjacent angles whose non-common sides are opposite rays.
Vertical angles are two angles that have a common vertex and whose sides form two lines. is a bisector of DAC if and only if is in the interior of DAC and mDAB = mCAB.
Angle Measure Postulate
A) Unique Measure Assumption: Every angle has a unique measure. The measure could be infinite or negative.
B) Two Sides of a Line Assumption: Given any ray and any number x, there are unique rays and such that intersects ray and mBEA = mCEA = x.
C) Zero Angle Assumption: If and are the same ray, then mAEB = 0.
D) Straight Angle Assumption: If and are opposite rays, then mAEB = 180.
E) Angle Addition Assumption: If (except for point E) is in the interior of AEB, then mAEC + mCEB = mAEB.
Theorems
Linear Pair Theorum: If two angles form a linear pair, then they are supplementary. See proof.
Vertical Angle Theorum: If two angles are vertical angles, then they have equal measures. See proof.Note: While you can usually get away with not knowing the names of theorums, your Geometry teacher will generally require you to know them.
Parallel Lines
Parallel lines are two coplanar lines that never intersect. They always have an equal distance between them. stands for "is parallel to". That's all there is to it. However, parallel lines AND angles, well, that's a different story. There are lots of postulates and theorums that have to do with them.
Postulates
Corresponding Angles Postulate: If two coplanar lines are cut by a transversal so that two corresponding angles have the same measure, then those lines are parallel.
Parallel Lines Postulate: If two lines are parallel and are cut by a transversal, corresponding angles have the same measure.
Theorems
Alternate Exterior Angles Theorum: If two parallel lines are cut by a transversal, the alternate exterior angles are congruent. See proof.
Alternate Interior Angles Theorum: If two parallel lines are cut by a transversal, the alternate interior angles are congruent. See proof.
Interior Angle Theorum: If two parallel lines are cut by a transversal, interior angles on the same side of the transveral are supplementary. See proof.
Note: Your teachers may not recognize the names of the above theorums.
Parallel Lines and Slopes Theorum: Two nonvertical lines are parallel if and only if they have the same slope.
Transivity of Parallelism Theorum: In a plane, if l m and m n, than l n.
Perpendicular LinesTwo segments are perpendicular if and only if the lines containing them form a 90 degree angle. stands for "is perpendicular to". Again, there isn't that much to perpendicular lines. There are a few theorems that you should know, however.
Theorems
Perpendicular Lines and Slopes Theorum: In a coordinate plane, the slopes of perpendicular lines are inverse reciprocals.
Perpendicular to Parallels Theorum: In a plane, if a line is perpendicular to one of two parallel lines, it's perpendicular to the other. See proof.
Two Perpendiculars Theorum: If two coplanar lines a and b are each perpendicular to the same line, then they are parallel to each other. See proof.Note: While you can usually get away with not knowing the names of theorums, your Geometry teacher will generally require you to know them.
Constructing Perpendiculars
In a construction, three rules apply.
CirclesDo I even need to answer this one? If you want the answer that bad see the introductory paragraph on compasses or -gasp- the three rules to constructions.
.
Perpendicular linesOkay, this one's a legitimate question.
Perpendicular bisectors
Midpoints
(
http://library.thinkquest.org/2647/geometry/geometry.htm)
Theorems
Perpendicular Lines and Slopes Theorum: In a coordinate plane, the slopes of perpendicular lines are inverse reciprocals.
Perpendicular to Parallels Theorum: In a plane, if a line is perpendicular to one of two parallel lines, it's perpendicular to the other. See proof.
Two Perpendiculars Theorum: If two coplanar lines a and b are each perpendicular to the same line, then they are parallel to each other. See proof.Note: While you can usually get away with not knowing the names of theorums, your Geometry teacher will generally require you to know them.
Constructing Perpendiculars
In a construction, three rules apply.
- A point must either be given, or the intersection of previously constructed figures.
- If a figure is given, you can assume as many points as necessary to make that figure.
- A straightedge can draw the line through two points A and B, while a compass can draw a circle with center point A and containing a second point B.
CirclesDo I even need to answer this one? If you want the answer that bad see the introductory paragraph on compasses or -gasp- the three rules to constructions.
.
Perpendicular linesOkay, this one's a legitimate question.
- Please pardon the fact that the drawings may be a little inexact. It's a little hard to do with Paint Shop Pro.
- First of all, you have to have a segment and a point in the line that is to be perpendicular, as you can see in the drawing.
- Then you draw half of a circle at any radius so that the segment is intersected in two points. You can extend the segment a little if you have to.
- Then you draw circles with each of the new points as centers and the distance between them as the radii.
- The last step is to use the straightedge to connect the dots with the point A and the new points made by the intersections of the circles.
Perpendicular bisectors
- Just repeat steps 3-4 above, using the endpoints of the segment as the points in question. Connect the new points with each other to get the perpendicular bisector.
Midpoints
- Just find the perpendicular bisector of the segment. Its midpoint is the point of intersection of the two lines.
(
http://library.thinkquest.org/2647/geometry/geometry.htm)
